Działanie regulatora PID w falownikach
Instrukcja dla falowników Inovance serii MD200, MD290, MD310 i MD500Regulator PID w falownikach wykorzystuje się głównie w takich aplikacjach, w których trzeba utrzymać odpowiedni poziom ciśnienia, napełnienia itp. wykorzystując przy tym czujniki analogowe.
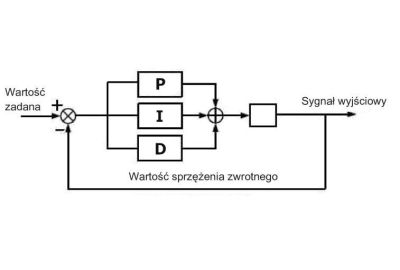
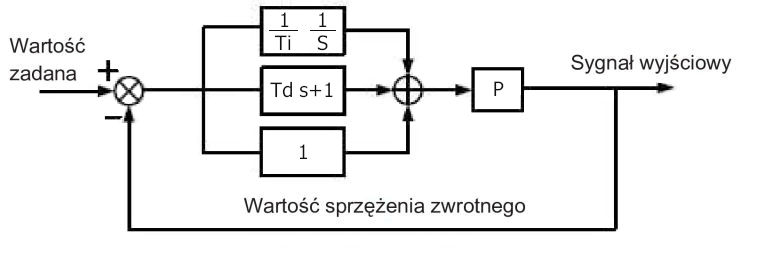
Regulacja PID jest metodą sterowania procesem. Wykonując operacje proporcjonalną, całkowania i różniczkowania na uchybie regulacji, czyli różnicą między sygnałem zadanym a sygnałem ze sprzężenia zwrotnego, falownik dostosowuje częstotliwość wyjściową w celu osiągnięcia i utrzymania wartości zadanej. Regulacja PID jest stosowana do kontroli takich procesów jak: utrzymywanie ciśnienia, temperatury lub przepływu. Poniższy rysunek przedstawia zasadę regulacji PID.
1. Podłączenie elektryczne
W pierwszej kolejności należy odpowiednio podłączyć czujnik do wejścia analogowego falownika. Zasilenie czujnika może się odbywać przez dostępne napięcie wychodzące z falownika lub z zewnętrznego zasilacza. Trzeba również pamiętać o rodzaju wyjścia z czujnika: czy jest to wyjście napięciowe 0-10V, czy prądowe 0/4-20mA.
Wyjście z czujnika należy podłączyć do wejścia analogowego w falowniku (oznaczone jako AI). Jeśli zasilanie czujnika pochodzi z zewnętrznego zasilacza lub z zacisku +24V w falowniku to należy podłączyć masę z zasilacz lub z falownika (oznaczone jako COM) z masą sygnału analogowego GND w falowniku.
Przykłady podłączenia:
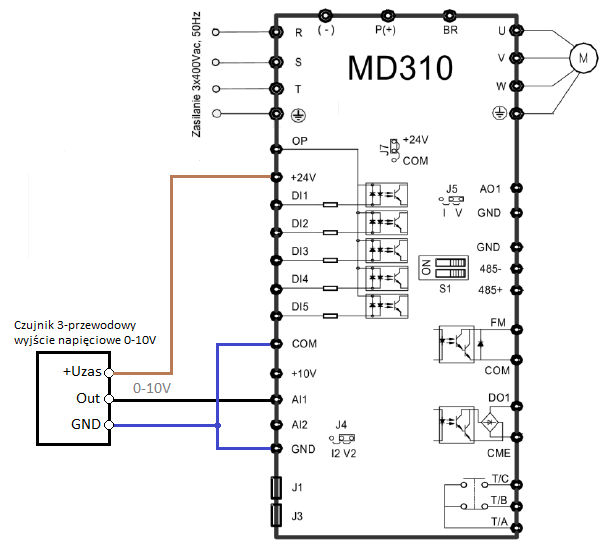
a) czujnik 3-przewodowy z wyjściem 0-10V, zasilany z wewnętrznego napięcia +24V falownika na przykładzie MD310:
b) czujnik 2-przewodowy z wyjściem prądowym 4-20mA, zasilany z zewnętrznego zasilacza na przykładzie falownika MD200
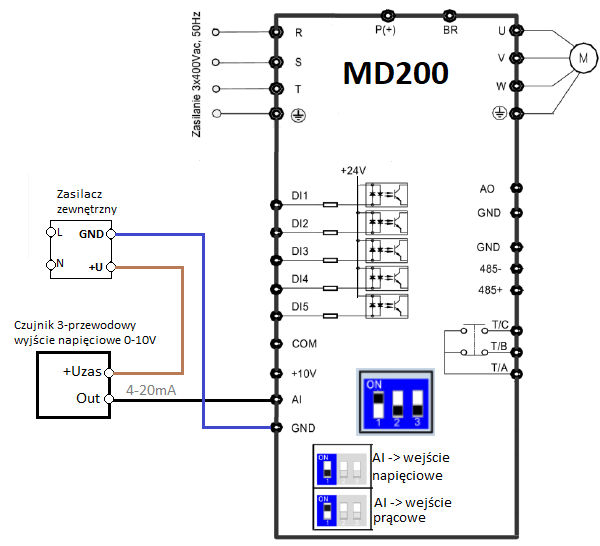
W każdym z falowników należy odpowiednio ustawić zworki/mikroswitch do pracy z wejściem napięciowym lub prądowym:
- MD200:
→ AI napięciowe 0-10V lub prądowe 0-20mA: ustawiane za pomocą mikroswitch
- MD290:
→ AI1 napięciowe 0-10V
→ AI2 napięciowe 0-10V lub prądowe 0-20mA: zworka J9
- MD310
→ AI1 napięciowe 0-10V
→ AI2 napięciowe 0-10V lub prądowe 0-20mA: ustawienie zworka J4
- MD500
→ AI1 napięciowe 0-10V
→ AI2 napięciowe 0-10V lub prądowe 0-20mA: ustawienie zworka J9
2. Parametryzacja falownika
Jedna z najczęściej pojawiających się aplikacji, gdzie potrzebny jest regulator PID jest utrzymanie wskazanego ciśnienia. Prezentowany przykład, będzie dotyczył właśnie takiego rozwiązania, gdzie falownik za pomocą podłączonej do niego pompy, będzie starał się utrzymać zadany poziom ciśnienia w układzie, a jego źródłem odniesienia będzie odczyt z czujnika ciśnienia.
Parametryzacja pod pracę PID:
Na początku należy wybrać źródło częstotliwości:
- F0-03 = 8 – regulacja PID
Ten krok należy wykonać tylko przypadku wykorzystania czujnika z wyjściem 4-20mA. Wykorzystane wejście analogowe należy odpowiednio przestawić na pomiar prądu w takim zakresie (zmienić minimalny poziom wejścia):
- F4-13 = 2.00 (tylko falownik MD200) – minimalny poziom wejścia AI
- F4-18 = 2.00 (falowniki MD290, MD310, MD500) – minimalny poziom wejścia AI2
Grupa parametrów FA-xx dotyczy ustawień dla regulatora PID:
- FA-00 = 0 → źródło zadawania wartości regulatora PID: 0 – z parametru FA-01
- FA-01 = 0-100% → wartość zadana regulatora PID
Powyższe parametry służą do wybrania docelowego źródła wartości regulacji PID. Ustawienie wartości zadanej jest wartością względną w zakresie od 0% do 100%. Sprzężenie zwrotne również jest wartością względną. Celem regulacji jest wyrównanie wartości zadanej PID i sprzężenia zwrotnego.
Kolejny parametr służy do wyboru kanału sygnału sprzężenia zwrotnego regulacji PID. Sprzężenie zwrotne jest wartością względną w zakresie od 0.0% do 100.0%.
- FA-02 = 0-8 → źródło sprzężenia zwrotnego regulatora PID w zależności od wykorzystanego wejścia analogowego:
- w MD200 0 = wejście AI
- w MD290, MD310, MD500 0 = wejście AI1 lub 1 = wejście AI2
Wybór wyjścia regulatora PID:
- FA-03 = 0 / 1:
→ 0 – wyjście normalne PID: gdy sprzężenie zwrotne PID jest niższe niż wartość zadana, częstotliwość wyjściowa przemiennika częstotliwości wzrasta.
→ 1 – wyjście odwrócone PID: gdy sprzężenie zwrotne PID jest niższe niż wartość zadana, częstotliwość wyjściowa przemiennika częstotliwości spada.
Funkcję można przełączyć również za pomocą wejścia cyfrowego ustawionego w parametrze na wartość 35.
- FA-04 = 0 – 65535
→ten parametr służy do ustawienia wartości wyświetlanej w parametrach U0-15 (podgląd wartości zadanej PID) oraz U0-16 (podgląd wartości sprzężenia zwrotnego PID). Wartość zapisana w parametrze FA-04 odpowiada wartości 100% wartości zadanej oraz wartości sygnału sprzężenia zwrotnego.
Po ustawieniu tych parametrów, falownik jest już przygotowany do pracy w trybie regulatora PID. Kolejne parametry odpowiedzialne są za zmianę charakterystyki pracy regulatora.
Regulacja poszczególnych członów regulatora PID:
Współczynnik wzmocnienia członu proporcjonalnego 1 (Kp1)
- FA-05 = 0.0 – 1000.0 (domyślnie 20) → wartość zgrubnie zmieniać o 10.0.
Duża wartość zmniejsza obecny błąd, ale zbyt duża wartość spowoduje oscylacje.
Czas całkowania 1 (Ti1)
- FA-06 = 0.01 – 10.00s (domyślnie 2.00s) → wartość zgrubnie zmieniać o 1.00s.
Im krótszy jest czas całkowania, tym szybciej można przewidzieć błąd, ale zbyt niska wartość spowoduje przeregulowanie lub oscylacje.
Czas różniczkowania 1 (Td1)
- FA-07 = 0.000 – 10.000s (domyślnie 0.000s) → wartość zgrubnie zmieniać o 0.01s.
Im dłuższy czas różniczkowania, tym szybciej system zareaguje na błąd, ale zbyt długi czas spowoduje wibracje i niestabilną pracę.
Częstotliwość załączenia odwrotnych obrotów:
- FA-08 = 0.0 – fmax → częstotliwość, przy której nastąpi załączenie odwrotnych obrotów silnika (przy 0.0 funkcja wyłączona)
Powyższe parametry są podstawowymi parametrami do wyregulowania pracy regulatora PID i do standardowych aplikacji takie jak utrzymanie stałego poziomu cieczy, lub ciśnienia są wystarczające.
Parametry od FA-09 do FA-28 służą do zaawansowanej konfiguracji regulatora PID.
Limit uchybu regulacji:
- FA-09 = 0.0-100.0% → jeżeli odchylenie pomiędzy sprzężeniem zwrotnym a wartością zadaną PID jest mniejsze niż wartość FA-09, regulacja PID zostaje zatrzymana.
Małe odchylenie pomiędzy sprzężeniem zwrotnym a wartością zadaną PID ustabilizuje częstotliwość wyjściową, co jest efektywne w niektórych zastosowaniach sterowania PID.
Limit różniczkowania regulacji:
- FA-10 = 0.0 – 100.0% → służy do ustawienia zakresu różniczkowego regulatora PID. W przypadku regulacji PID działanie różniczkowe może łatwo powodować oscylacje systemu. Dlatego regulacja różniczkowa PID jest ograniczona do małego zakresu.
Czas zmiany wartości zadanej regulacji:
- FA-11 = 0.00 – 650.00s → wskazuje czas zmiany nastawy od 0.0% do 100.0%. Nastawa zmienia się liniowo w zależności od ustawionego czasu, zmniejszając wpływ na system spowodowany nagłą zmianą wartości zadanej regulacji PID.
Czas filtra sprzężenia zwrotnego:
- FA-12 = 0.00 – 60.00s → służy do filtrowania sprzężenia zwrotnego regulacji PID, pomaga zredukować szybkie zmiany sygnału z czujnika. Jednak spowalnia reakcję systemu.
Czas filtra wyjścia regulatora:
- FA-13 = 0.00 – 60.00s → służy do filtrowania częstotliwości wyjściowej regulacji PID, zmniejszając wahania częstotliwości wyjściowej. Jednak spowalnia reakcję systemu.
Parametry przełączania:
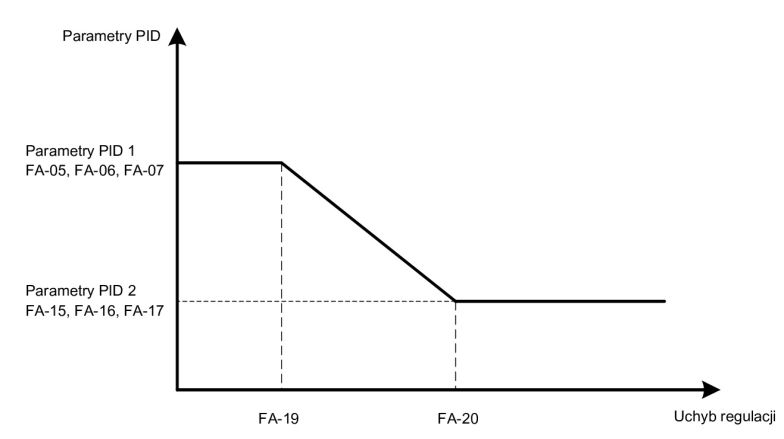
W niektórych zastosowaniach wymagane jest przełączanie parametrów PID, gdy jedna grupa parametrów nie jest w stanie spełnić wymagań całego działania procesu. Parametry służą do przełączania pomiędzy dwiema grupami parametrów PID. Parametry od FA-15 do FA-17 ustawia się w taki sam sposób jak parametry od FA-05 do FA-07. Przełączenie może odbywać się za pomocą wejść cyfrowych lub automatycznie na podstawie odchylenia regulacji.
Aby włączyć przełączenie za pomocą zacisku cyfrowego, należy ustawić wartość przypisanego do niego parametru na wartość 43. Jeżeli zacisk nie jest aktywny, wybrana jest grupa 1 (parametry od FA-05 do FA-07), jeżeli zacisk jest aktywny, wybrana jest grupa parametrów 2 (parametry od FA-15 do FA-17).
Jeżeli automatyczne przełączenie jest włączone, gdy wartość bezwzględna uchybu jest mniejsze niż wartość parametru FA-19, wybierana jest grupa 1. Natomiast, jeżeli gdy wartość uchybu jest wyższa niż wartość parametru FA-20, wybierana jest grupa 2. Gdy odchylenie znajduje się pomiędzy wartościami parametrów FA-19 oraz FA-20, parametry PID są interpolacją liniową wartości dwóch grup parametrów, jak pokazano na poniższym rysunku.
Współczynnik wzmocnienia członu proporcjonalnego 2 (Kp2)
- FA-15 = 0.0 – 1000.0 (domyślnie 20) → analogicznie do FA-05
Czas całkowania 2 (Ti2)
- FA-16 = 0.01 – 10.00s (domyślnie 2.00s) → analogicznie do FA-06
Czas różniczkowania 2 (Td2)
- FA-17 = 0.000 – 10.000s (domyślnie 0.000s) → analogicznie do FA-07
Przełączenie parametrów regulacji:
- FA-18 = 0-3
→ 0 – brak
→ 1 – wejście cyfrowe
→ 2 – automatycznie po błędzie regulacji
→ 3 – automatycznie po przekroczeniu częstotliwości wyjściowej
Odchylenie przełączenia parametrów 1:
- FA-19 = 0.0% do FA-20
Odchylenie przełączenia parametrów 2:
- FA-20 = FA-19
Pozostałe parametry regulatora PID:
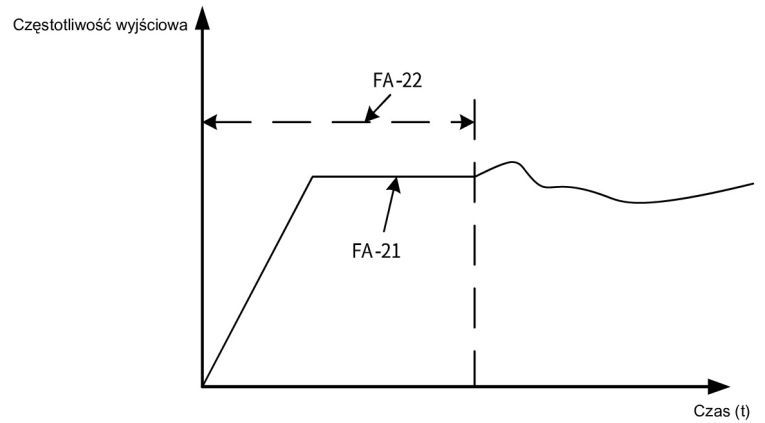
Wartość zadana regulacji PID przy starcie:
- FA-21 = 0.0 – 100.0%
Czas aktywności wartości zadanej PID przy starcie:
- FA-22 = 0.00 – 650.00s
Kiedy uruchamiany jest silnik w trybie regulacji PID, w pierwszej kolejności jest ustawiona wartość parametru FA-21 przez czas parametru FA-22.
Parametry FA-23 oraz FA-24 odpowiadają maksymalnej wartości bezwzględnej uchybu sygnału wyjściowego odpowiedni w kierunku do przodu i do tyłu.
Maksymalna różnica pomiędzy dwoma wyjściami PID przy pracy do przodu:
- FA-23 = 0.00 – 100.0%
Maksymalna różnica pomiędzy dwoma wyjściami PID przy pracy do tyłu:
- FA-24 = 0.00 – 100.0%
Właściwości członu całkującego:
- FA-25 = 00 – 11
→ cyfra jednostek – separacja całkowania: 0 – wyłączona, 1 - włączona
→ cyfra dziesiątek – wyłączenie członu całkującego, gdy wyjście PID osiągnie wartość graniczną: 0 - kontynuuj całkowanie, 1 – zatrzymaj całkowanie
Separacja całkowania: Jeżeli wartość parametru jest ustawiona na wartość 1, funkcja całkowania zostaje wstrzymana, gdy wejście cyfrowe ustawione na wartość 38 jej włączone. W takim przypadku działają człony proporcjonalny oraz różniczkowy. Jeżeli wartość parametru jest ustawiona na wartość 0, separacja całkowania nie działa niezależnie od ustawienia wejścia cyfrowego na wartość 38. Wyłączenie członu całkującego gdy wyjście PID osiągnie wartość graniczną: gdy wartość parametru ustawionego na wartość 1, działanie członu całkującego zostaje wyłączone, co może spowodować zmniejszenie przeregulowania PID.
Poniższe parametry są używane do sprawdzenia, czy sprzężenie zwrotne regulacji PID nie zostało utracone. Jeżeli wartość sprzężenia zwrotnego jest niższa niż wartość parametru FA-26, i utrzymuje się przez czas dłuższy niż w parametrze FA-27, falownik zgłasza błąd Err31 i działa zgodnie z wybraną operacją zabezpieczenia przed uszkodzeniem.
Poziom wykrycia utraty sprzężenia zwrotnego:
- FA-26 = 0.0 – 100.0% (0.0% funkcja wyłączona)
Czas wykrycia utraty sprzężenia zwrotnego:
- FA-27 = 0.0 – 20.0s
Stan regulatora PID po zatrzymaniu silnik:
- FA-28 = 0 lub 1 → 0 – wyłączony, 1 - włączony
Ostatni parametr służy do określenia, czy kontynuować działanie regulatora PID po zatrzymaniu silnika. Ogólnie rzecz biorąc, działanie regulatora PID jest wyłączone gdy silnik jest zatrzymany.