
AP820 - dwuwymiarowy skaner laserowy
- Zakres pomiarowy: 5,9 - 1000mm.
- Rozdzielczość: 3 - 600μm.
- Częstotliwość próbkowania do 200Hz.
- Odwzorowanie profili obiektów w 2D i 3D.
- Opcjonalnie niebieskie diody lasera.
- Praca w temperaturze do 400°C przy zastosowaniu chłodzonej obudowy (opcja).
- Ethernet.

Opis
Specyfikacja:
| Model |
Zakres pomiarowy |
Początek zakresu pomiarowego |
Koniec zakresu pomiarowego |
Liniowość oś Z i X |
Pole widzenia: początek zakresu pom. koniec zakresu pom. |
Rozdzielczość oś Z i X |
|---|---|---|---|---|---|---|
| AP820-5 | 5,9 mm | 38 mm | 43,9 mm | ±3,5 μm |
3,9 mm 5,0 mm |
3,0 μm |
| AP820-20 | 20 mm | 53 mm | 73 mm | ±12 μm |
10 mm 13 mm |
11 μm |
| AP820-40 | 40 mm | 50 mm | 90 mm | ±24 μm |
20 mm 27 mm |
±19 μm |
| AP820-60 | 60 mm | 53 mm | 113 mm | ±36 μm |
30 mm 40 mm |
±31 μm |
| AP820-80 | 80 mm | 60 mm | 140 mm | ±48 μm |
40 mm 55 mm |
±42 μm |
| AP820-120 | 120 mm | 84 mm | 204 mm | ±72 μm |
60 mm 80 mm |
±63 μm |
| AP820-240 | 240 mm | 220 mm | 460 mm | ±144 μm |
120 mm 160 mm |
±112 μm |
| AP820-400 | 400 mm | 30 mm | 730 mm | ±240 μm |
200 mm 280 mm |
±213 μm |
| AP820-1000 | 1000 mm | 700 mm | 1700 mm | ±630 μm |
500 mm 800 mm |
±600 μm |
Dwuwymiarowy skaner laserowy AP820 to czujnik o wysokiej dokładności przeznaczony do pomiarów w aplikacjach przemysłowych - w szczególności do wymiarowania powierzchni. Niskoszumowe, szybkie i dokładne, odwzorowanie dwu- lub trójwymiarowych (2D, 3D) profili obiektów, powierzchni lub otoczenia. Kompensacja zmiennych warunków otoczenia przez automatyczny dobór mocy i czasu naświetlania detektora.
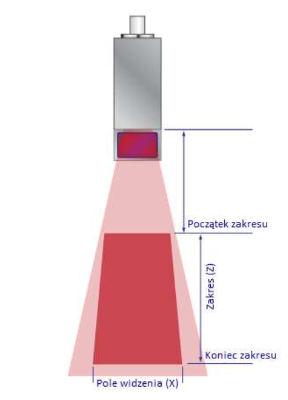
Skaner AP820 mierzy wysokość profilu powierzchni poprzez projekcję wiązki widzialnego światła laserowego tworzącej linię na powierzchni obiektu. Odbite pod kątem światło rejestrowane jest przez wewnętrzny detektor CCD. Procesor oblicza dwuwymiarowy kontur obiektu na podstawie analizy pikseli rozproszonego obrazu odbitej linii. Urządzenie automatycznie reguluje moc lasera oraz czas naświetlania w zależności od współczynnika odbicia światła obiektu. Dane pomiarowe wysokości profilu przesyłane są do komputera poprzez port Ethernet. Trójwymiarowe (3D) profilowanie w czasie rzeczywistym tworzone jest poprzez synchronizację pomiaru obrazu z pozycją skanera odczytaną bezpośrednio z enkodera sprzężonego z przenośnikiem, modułem liniowym lub osią robota. W zależności od zasięgu oraz pola widzenia dostępnych jest kilka wersji skanera.
Wymiary:
