
Przekładnia ślimakowa Fiama RD26
- Obudowa z anodowanego aluminium, wały ze stali.
- Wersja przeznaczona do pracy z śrubą trapezową (nie dostarczana w zestawie)
- Wiele przełożeń.
- Kilka opcji konfiguracji.
- Kołnierze do bezpośredniego połączenia z maszyną, silnikiemi i wskaźnikami pozycji.
Opis
Przekładnia ślimakowa RD26 - główne cechy:
Kompaktowa przekładnia z przeznaczeniem do różnych zastosowań przemysłowych, w szczególności do automatyki i robotyki. Może być dostarczona z czujnikiem magnetycznym, silnikiem lub motoreduktorem.
- Obudowa wykonana z anodowanego aluminium, wały wykonane ze stali utwardzanej powierzchniowo o wysokiej odporności na zużycie i korozję
- Wersja przeznaczona do pracy z śrubą trapezową (nie dostarczana w zestawie)
- Standardowe przełożenia: 1:1 - 1:2 - 1:3 - 1:4 - 1:5- 1:7,5 - 1:10 - 1:15 - 1:25 - 1:30
- Kilka opcji konfiguracji ze zwykłymi / drążonymi wałami wejściowymi i wyjściowymi
- Kołnierze do bezpośredniego połączenia z maszyną, silnikiem i wskaźnikami pozycji
| FAwe = we. obciążenie osiowe | 20N |
|---|---|
| FAwy = wy. obciążenie osiowe | 20N |
| FRwe = we. obciążenie promieniowe | 100N |
| FRwy = wy. obciążenie promieniowe | 200N |
| Maks. luz | 0,75° |
| Maks. we. prędkość obrotowa | 5.000 obr./min. |
| Temperatura pracy | -20 +90° |
| Żywotność | 10.000 h |
| Waga | 80 gr |
| Smarowanie | smar Klüber AG 11-462 |
Przekładnia ślimakowa RD26 - tabela wydajności:
| Przełożenie i | 1/1 | 1/2 | 1/3 | 1/4 | 1/5 | 1/7,5 | 1/10 | 1/12,5 | 1/15 | 1/25 | 1/30 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sprawność R [%] | 0,72 | 0,72 | 0,69 | 0,63 | 0,60 | 0,61 | 0,55 | 0,39✽ | 0,45✽ | 0,45✽ | 0,30✽ |
| We. moment obr. TI [Nm] | 4,18 | 2,07 | 1,46 | 1,19 | 1 | 0,66 | 0,55 | 0,61 | 0,44 | 0,48 | 0,34 |
| Wy. moment obr. TO [Nm] | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
➜ W aplikacjach, w których mamy do czynienia z pracą ciągła, prosimy o kontakt z naszym działem technicznym. W takich przypadkach przygotowany zostanie otwór smarowniczy, umożliwiający okresowe smarowanie z częstotliwością zależną od warunków pracy.
- Aby znaleźć odpowiedni reduktor należy zapoznać się z wartościami w tabeli. Jeśli rzeczywiste obciążenia i sprawność są bardzo zbliżone do wartości podanych w tabeli, należy skontaktować się z działem technicznym.
- Wszystkie tabele pokazują pomiary liniowe wyrażone w milimetrach, chyba że określono inaczej.
- Wszystkie współczynniki redukcji są wyrażone jako ułamek, chyba że określono inaczej.
- Wszystkie siły, sprawność i obciążenia są wyrażone w N lub Nm (10 N ≅ 1 kg lub 10 Nm ≅ 1 kg), chyba że określono inaczej.
Przekładnia ślimakowa RD26 - dostępne wersje:
- RD26 Reduktor

- RD26F do śruby trapezowej (śruba nie jest dostarczana w zestawie)

- RD26S z czujnikiem magnetycznym

- RD26M z silnikiem z magnesem trwałym

- RD26MS z silnikiem z magnesem trwałym i czujnikiem magnetycznym

- RD26MR z motoreduktorem

- RD26MRS z motoreduktorem i czujnikiem magnetycznym

Przekładnia ślimakowa RD26 - czujnik magnetyczny:
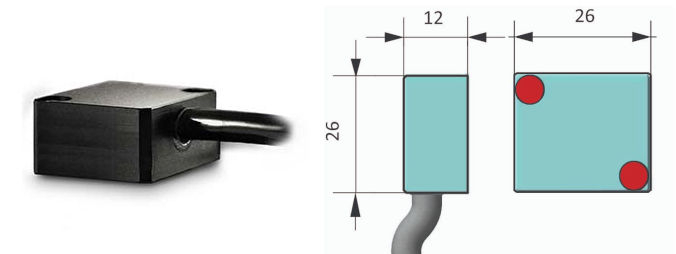
| Wymiary | 12 x 26 x 26 mm |
|---|---|
| Zasilanie | 10 ÷ 30 Vdc ±10%, maks. 60 mA |
| Dokładność | 256 imp./obr. |
| Maks. prąd wyjściowy | kanały A - B (20mA) |
| Stopień ochrony | IP66 |
| Obudowa | anodyzowane aluminium |
| Temperatura pracy | -10 ÷ 70 °C |
| Wilgotność pracy | 10 ÷90% |
| Przewód wyjściowy | 0,5 - 1 -2 -5 -10 metrów |
| EMC | 2004/108/CE |
Przekładnia ślimakowa RD26 - silniki:
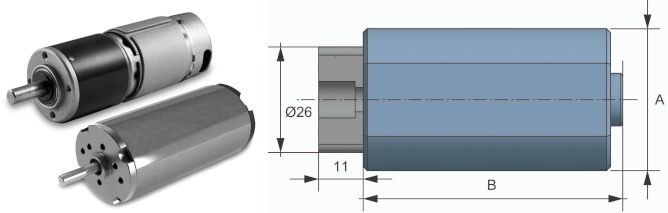
| Silniki "M" ze sprzęgłem dla RD26 | Motoreduktory "MR" ze sprzęgłem dla RD26 | ||||||
|---|---|---|---|---|---|---|---|
| A | B | obr./min. | Moment [Nm] | A | B | obr./min. | Moment [Nm] |
| 35 | 56 | 2200 | 0,06 | 30 | 75 | 450 | 0,4 |
| 35 | 65 | 11000 | 0,05 | ||||
| odpowiednie do zastosowań o zmiennej częstości ruchu | odpowiednie do zastosowań w reżimie pracy ciągłej | ||||||
Przekładnia ślimakowa RD26 - wymiary:
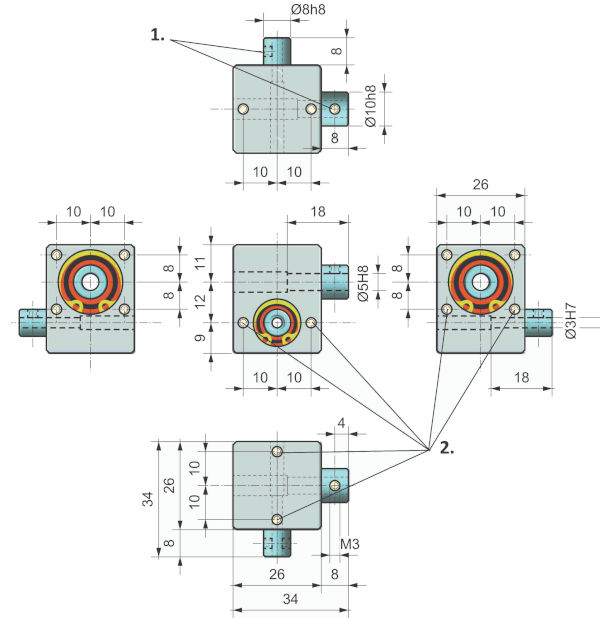
1. Trzpienie mocujące wałek (M3)
2. Otwory gwintowane (M3)
Dla wersji RD26F:
