
"Motor Selection Guide" to narzędzie projektowe, które znacząco ułatwia proces wyboru odpowiedniego silnika do modułu liniowego. Dzięki temu inżynierowie mogą szybko i skutecznie określić, który silnik spełnia wymogi projektowe układu.
Formularz obliczeniowy doboru silnika znajduje się na stronie Fastech-motions.com.
Kolor żółty wskazuje pola parametrów, których wprowadzenie jest niezbędne dla przeprowadzenia obliczeń.
Podczas wpisywania parametrów należy pamiętać o jednostkach, oraz o stosowaniu kropek w przypadku rozwinięcia dziesiętnego liczb.
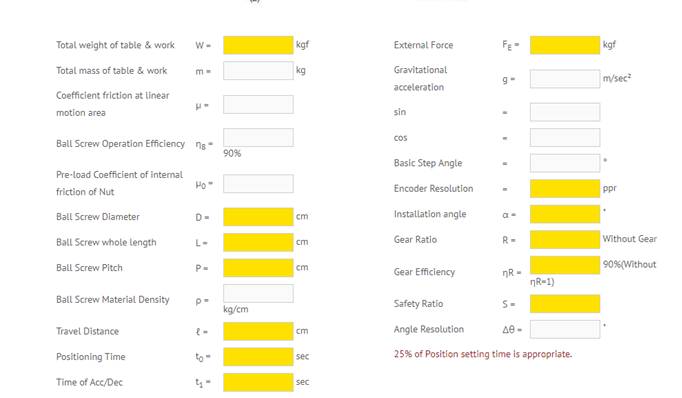
Formularz obliczeniowy
Parametry do wprowadzenia przy doborze silnika do modułu liniowego:
Total weight of table & work (Całkowita masa do przesunięcia[W]): Określa łączną masę obiektów, które będą na nim się poruszać, wyrażoną w kilogramach (kgf).
Ball Screw Diameter (Średnica śruby kulowej [D]): Wartość wyrażona w centymetrach, określająca średnicę śruby kulowej.
Ball Screw whole length (Całkowita długość śruby kulowej [L]): Długość całej śruby kulowej, również wyrażona w centymetrach.
Ball Screw Pitch (Skok śruby kulowej [P]): Odległość o jaką przesunie się karetka podczas jednego obrotu.
Travel Distance (Dystans podróży [ℓ]): Odległość, na którą ma przemieścić się karetka, wyrażona w centymetrach.
Positioning Time (Czas pozycjonowania [t0]): Czas, w jakim karetka ma osiągnąć pożądaną pozycję, wyrażony w sekundach.
Time of Acc/Dec (Czas przyspieszania/hamowania [t1]): Czas, potrzebny modułowi na osiągnięcie pełnej prędkości lub zatrzymanie się, wyrażony w sekundach.
External Force (Siła zewnętrzna [FE]): Siła, jaka będzie działać na karetkę, wyrażona w kilogramach [kgf].
Encoder Resolution (Rozdzielczość enkodera): Liczba impulsów na obrót sprzężonego enkodera, która wpływa na dokładność pozycjonowania.
Installation angle (Kąt instalacji [α]): Kąt nachylenia modułu podczas jego pracy. W przypadku pracy poziomej kąt wynosi 0˚, zaś pionowej 90˚. W pozycji pośredniej podajemy kąt zmierzony pomiędzy osią śruby kulowej, a poziomem grawitacyjnym.
Gear Ratio (Przełożenie przekładni [R]): W przypadku stosowania przekładni - stosunek między prędkością obrotową wału silnika, a prędkością obrotową śruby kulowej. W przypadku braku przekładni przyjmujemy wartość „1”.
Gear Efficiency (Sprawność przekładni [ηR]): Procentowa wartość określająca efektywność przekładni mechanicznej. W przypadku śruby kulowej wartość ta przyjmuje „1”.
Safety Ratio (Wskaźnik bezpieczeństwa [S]): Wartość, która zapewnia zapas bezpieczeństwa przy doborze silnika. Wpisujemy „2”
------------
Po wprowadzeniu wszystkich danych należy kliknąć w przycisk „Calculate”.
Obliczone szacunkowe parametry silnika zostają wyświetlone w polu „Motor Selection”.
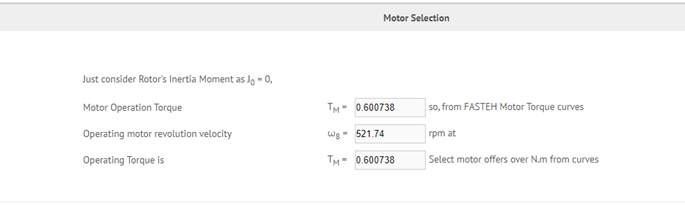
Przykładowe dane wynikowe w polu „Motor Selection”
Przykładowo możemy odczytać, że wymagany moment silnika wynosi 0.600738Nm przy jego prędkości obrotowej równej 521.74 rpm (obroty/min.). Na tym etapie doboru, należy sięgnąć do katalogu silników i dobrać taki, którego wartość momentu obrotowego jest równa lub nieznacznie większa od danych obliczeniowych.
W naszym przypadku, wybór padł na serwomotor typu MS1H1-20B30CB-A331Z, którego moment znamionowy wynosi 0.64Nm.
Po dobraniu silnika, przechodzimy do pola „Verify validation of selected motor”, które służy dodatkowej weryfikacji dopasowania inercji silnika do układu mechanicznego, w naszym przypadku modułu liniowego.
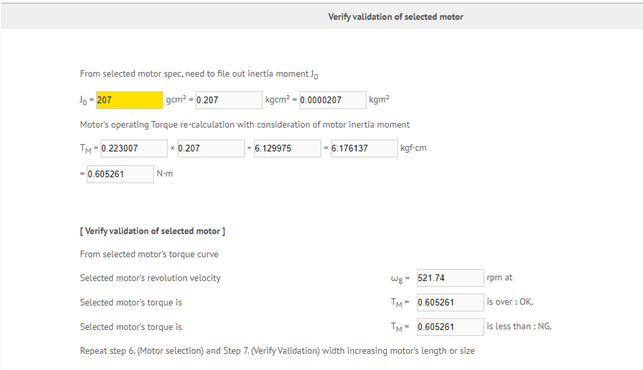
Pole weryfikacji inercji
Inertia moment (Bezwładność własna wirnika [J0]): w tym polu zadajemy inercję odczytaną z parametrów znamionowych dobranego przez nas szacunkowo silnika. W naszym przypadku wartość ta wynosi 207gcm². Wpisanie tej wartości jest niezbędne dla wyliczenia dynamiki układu.
Ponownie klikamy przycisk „Calculate”. Narzędzie dokona dodatkowych obliczeń, z których będziemy mogli odczytać stosunek bezwładności układu mechanicznego do bezwładności wirnika silnika (parametr K).
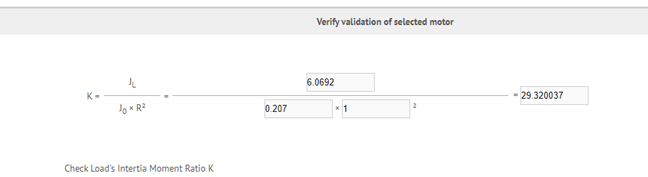
Pole wynikowego dopasowania inercji – wstępna weryfikacja
Wartość parametru K, w zależności od rodzaju napędu, nie powinna przekraczać 10-30. W przypadku serwomotorów górna granica wynosi 10. (Więcej na temat dopasowania inercji w artykule -> tu).
Jak można zauważyć w naszym przykładzie, parametr ten został przekroczony prawie trzykrotnie, co oznacza, że inercja silnika powinna być proporcjonalnie większa. Należy więc zweryfikować dotychczasowy wybór modelu silnika i posługując się katalogiem dobrać taki, którego inercja będzie większa. I tym razem parametry znamionowe momentu obrotowego i prędkości muszą także spełniać wcześniejsze warunki obliczeniowe. W naszym przypadku wybór padł na serwomotor MS1H4-40B30CB-A331Z. Jego inercja wirnika wynosi 657gcm².
Dla sprawdzenia, wartość tę ponownie wpisujemy w pole „Verify validation of selected motor” i naciskamy „Calculate”.
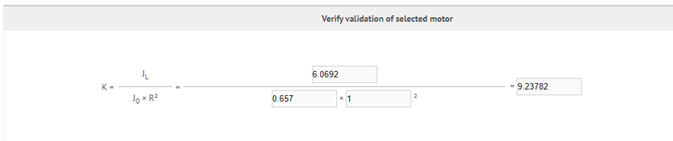
Pole wynikowego dopasowania inercji – ponowna weryfikacja
Wartość inercji ostatecznie wybranego silnika zapewnia prawidłową dynamikę całego układu, gdyż tym razem parametr K = 9,23782 nie przekracza wartości 10. Serwomotor został dobrany prawidłowo.
Linki stron użytych w niniejszym artykule:
Link do narzędzia projektowego: fastech-motions.com
Link do strony modułów liniowych: moduły liniowe
Link do strony serwonapędów Inovance: serwonapędy



