
Efektem poniższej parametryzacji falownika Inovance będzie:
- zadawanie częstotliwości pracy przy pomocy potencjometru zewnętrznego,
- załączenie/wyłączenie pracy oraz wybór kierunku obrotów z użyciem przycisków/przełączników zewnętrznych.
Ustawienia sprawdzają się we wszystkich falownikach Inovance serii: MD200, MD310, MD520.
Wymagania dotyczące zewnętrznego potencjometru:
- liniowy
- rezystancja od 1kΩ do 5kΩ
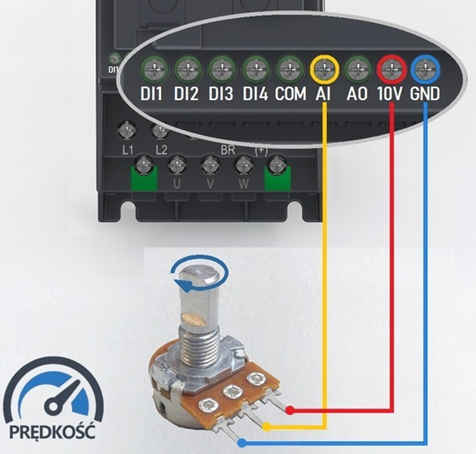
Podłaczenie nóżek potncjometru:
- środkowa do wejścia AI
- zewnętrzne do zacisków 10V oraz GND

Przykład podłączenia potencjometru w falowniku INOVANCE serii MD200:
Zadawanie prędkości z zewnętrznego potencjometru - parametryzacja
Aby falownik reagował na podłączony potencjometr, należy ustawić odpowiedni parametr w falowniku.
Dla parametru F0-03 wybieramy wartość 2.
Jak ustawić ten parametr?
Po włączeniu zasilania falownika należy nacisnąć przycisk PRG na klawiaturze falownika. Na wyświetlaczu powinno wyświetlić się F0 – jeśli pojawia się inny napis, to za pomocą strzałek góra/dół należy wyszukać grupę parametrów F0. Za pomocą przycisku Enter zatwierdzić wybór, a następnie przy pomocy przycisków góra/dół wybrać F0-03. Po odnalezieniu parametru, wcisnąć przycisk Enter i przyciskami góra/dół ustawić wartość 2. Ponownie wcisnąć przycisk Enter w celu zatwierdzenia nowej wartości. Zatwierdzenie powinno skutkować wyświetleniem kolejnego parametru F0-04. Tym samym regulacja częstotliwości przy pomocy zewnętrznego potencjometru została aktywowana. Po dwukrotnym naciśnięciu przycisku PRG na ekranie będzie widoczna aktualnie ustawiona częstotliwość zadana przez potencjometr.
Sterowanie pracą falownika z zewnętrznych przycisków
W falownikach marki Inovance dostępne jest sterowanie 2 lub 3-przewodowe. Parametr F4-11 pozwala na wybór jednej z 4 dostępnych metod sterowana za pomocą wejść cyfrowych DI terminala zacisków.
W przykładach metod załączania/wyłączania pracy silnika i zmiany jego kierunku obrotów wykorzystano wejścia cyfrowe DI1, DI2 i DI3. Jednakże do sterowania można wykorzystać dowolną kombinację wejść cyfrowych po ich uprzednim sparametryzowaniu.
1. Sterowanie dwuprzewodowe
1.1 Metoda pierwsza: F4-11 = 0
Jest to najczęściej stosowana metoda sterowania dwuprzewodowego, w której o obrotach silnika w przód/tył decyduje kombinacja stanów wejść DI1 oraz DI2.
Parametry są ustawione jak poniżej:
|
Parametr |
Nazwa parametru |
Wartość |
Opis funkcji |
|
F0-02 |
Źródło sterowania (START/STOP) |
1 |
Sterowanie wejściami cyfrowymi (terminal zaciskowy falownika) |
|
F4-11 |
Metoda sterowania wejściami cyfrowymi |
0 |
Sterowanie dwuprzewodowe, metoda 1 |
|
F4-00 |
Wybór funkcji wejścia DI1 |
1 |
Praca w przód (FWD) |
|
F4-01 |
Wybór funkcji wejścia DI2 |
2 |
Praca w tył (REV) |
Jak pokazano na poniższym rysunku, gdy przełącznik S1 jest zwarty, silnik pracuje w kierunku „do przodu”. Gdy przełącznik S2 jest zwarty, silnik pracuje w kierunku „do tyłu”. Gdy oba przełączniki S1 i S2 są jednocześnie zwarte lub rozwarte, silnik zatrzymuje się.

Schemat podłączenia:
Tabela zależności:

S1 – przełącznik bistabilny
S2 – przełącznik bistabilny
|
S1 |
S2 |
Komenda ruchu |
|
1 zamknięty |
0 otwarty |
W przód |
|
0 otwarty |
1 zamknięty |
W tył |
|
1 zamknięty |
1 zamknięty |
STOP |
|
0 otwarty |
0 otwarty |
STOP |
1.2 Metoda druga: F4-11 = 1
W tej metodzie wejście DI1 jest zaciskiem odpowiadającym za pracę silnika, natomiast wejście DI2 określa kierunek ruchu. Parametry są ustawione jak poniżej:
|
Parametr |
Nazwa parametru |
Wartość |
Opis funkcji |
|
F0-02 |
Źródło sterowania (START/STOP) |
1 |
Sterowanie wejściami cyfrowymi (terminal zaciskowy falownika) |
|
F4-11 |
Metoda sterowania wejściami cyfrowymi |
1 |
Sterowanie dwuprzewodowe, metoda 2 |
|
F4-00 |
Wybór funkcji wejścia DI1 |
1 |
Praca |
|
F4-01 |
Wybór funkcji wejścia DI2 |
2 |
Kierunek przód/tył |
Jak pokazano na poniższym rysunku, gdy przełącznik S1 jest zwarty, a przełącznik S2 jest rozwarty, silnik pracuje w kierunku „do przodu”. Praca silnika „do tyłu” następuje, gdy przełączniki S1 oraz S2 są zwarte. W każdym przypadku gdy przełącznik S1 jest rozwarty, silnik zatrzymuje się.

Schemat podłączenia:
Tabela zależności:
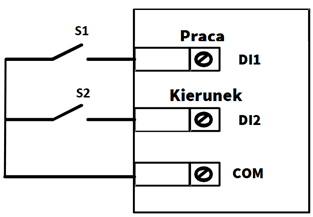
S1 – przełącznik bistabilny
S2 – przełącznik bistabilny
|
S1 |
S2 |
Komenda ruchu |
|
1 zamknięty |
0 otwarty |
W przód |
|
1 zamknięty |
1 zamknięty |
W tył |
|
0 otwarty |
stan dowolny |
STOP |
2. Sterowanie trójprzewodowe
2.1 Metoda pierwsza: F4-11=2
W tej metodzie wejście DI3 jest zaciskiem aktywnym komendy RUN/STOP, natomiast kierunek jest określany przez wejścia DI1 i DI2 sterowane impulsowo.
Parametry są ustawione jak poniżej:
|
Parametr |
Nazwa parametru |
Wartość |
Opis funkcji |
|
F0-02 |
Źródło sterowania (START/STOP) |
1 |
Sterowanie wejściami cyfrowymi (terminal zaciskowy falownika) |
|
F4-11 |
Metoda sterowania wejściami cyfrowymi |
2 |
Sterowanie trójprzewodowe, metoda 1 |
|
F4-00 |
Wybór funkcji wejścia DI1 |
1 |
Praca w przód (FWD) |
|
F4-01 |
Wybór funkcji wejścia DI2 |
2 |
Praca w tył (REV) |
|
F4-02 |
Wybór funkcji wejścia DI3 |
3 |
Sterowanie trójprzewodowe (STOP) |
Jak pokazano na poniższym rysunku, za komendę pracy oraz wybór kierunku obrotów odpowiadają przełączniki S1 (zacisk DI1) – praca silnika w kierunku „do przodu” - oraz S2 (zacisk DI2) – praca silnika w kierunku „do tyłu”. Warunkiem pracy jest zwarty przycisk S3 (zacisk DI3). Zatrzymanie falownika odbywa się poprzez rozwarcie przełącznika S3. Wszystkie wejścia są sterowane impulsowo.

Schemat podłączenia:
Tabela zależności:

S1 – przełącznik chwilowy NO
S2 – przełącznik chwilowy NO
S3 – przełącznik chwilowy NC
|
S1 |
S2 |
S3 |
Komenda ruchu |
|
1* zamknięty |
0 otwarty |
1 zamknięty |
W przód |
|
0 otwarty |
1* otwarty |
1 zamknięty |
W tył |
|
stan dowolny |
stan dowolny |
0* otwarty |
STOP |
*impuls
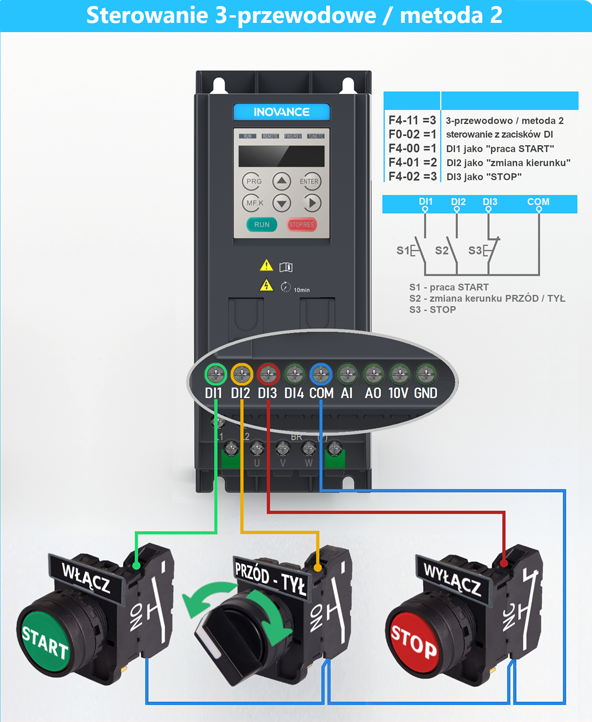
2.2 Metoda druga: F4-11=3
W tej metodzie DI1 jest zaciskiem odpowiadającym za komendę RUN, a kierunek jest określany przez zacisk DI2. Za zatrzymanie silnika odpowiada rozwarcie zacisku DI3. Parametry są ustawione jak poniżej:
|
Parametr |
Nazwa parametru |
Wartość |
Opis funkcji |
|
F0-02 |
Źródło sterowania (START/STOP) |
1 |
Sterowanie wejściami cyfrowymi (terminal zaciskowy falownika) |
|
F4-11 |
Metoda sterowania wejściami cyfrowymi |
3 |
Sterowanie trójprzewodowe, metoda 2 |
|
F4-00 |
Wybór funkcji wejścia DI1 |
1 |
Komenda RUN |
|
F4-01 |
Wybór funkcji wejścia DI2 |
2 |
Kierunek przód/tył |
|
F4-02 |
Wybór funkcji wejścia DI3 |
3 |
Sterowanie trójprzewodowe (STOP) |
Jak pokazano na poniższym rysunku, gdy przełącznik S3 jest zwarty (zacisk DI3) wówczas impuls podany za pomocą przełącznika S1 (zacisk DI1) spowoduje uruchomienie silnika. Kierunek obrotów silnika zależny jest od przełącznika S2 (zacisk DI2) – gdy przełącznik S2 jest rozwarty, wówczas silnik pracuje w kierunku „do przodu”, natomiast po jego zwarciu silnik będzie pracował w kierunku „do tyłu”. Zatrzymanie silnika następuję po rozwarciu przełącznika S3
Schemat podłączenia:
Tabela zależności:
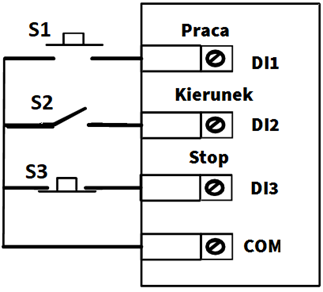
S1 – przełącznik chwilowy NO
S2 – przełącznik bistabilny
S3 – przełącznik chwilowy NC
|
S1 |
S2 |
S3 |
Komenda ruchu |
|
1* zamknięty |
0 otwarty |
1 zamknięty |
W przód |
|
1* zamknięty |
1 zamknięty |
1 zamknięty |
W tył |
|
stan dowolny |
stan dowolny |
0* otwarty |
STOP |
*impuls



