
Napęd serwo krokowy Fastech S-SERVOII-ST-60L-A z enkoderem
- Praca w zamkniętej pętli sprzężenia zwrotnego.
- Precyzja bez utraty synchronizacji.
- Redukcja temperatury silnika oraz strat.
- Zasilanie 24Vdc.
- Kołnierz silnika: 60mm.


Opis
W porównaniu do S-SERVO, nowe napędy Fastech z serii S-SERVO II cechują się enkoderem o większej rozdzielczości (10000 pozycji na obrót) oraz dostępnością sygnałów enkoderowych ABZ oraz ich negacji.
Napęd serwo krokowy S-SERVOII-ST-60L-A:
| W zestawie |
|---|
- Sterownik silnika
- Silnik z zabudowanym enkoderem
- Komplet wtyczek
- Oprogramowanie do konfiguracji napędu (w zakładce "Do pobrania")
W ofercie dostępne są także przekładnie, hamulce, konwertery oraz przewody połączeniowe.
Napęd serwo krokowy S-SERVOII-ST-60L-A - specyfikacja techniczna:
| Kod zamówieniowy | S-SERVOII-ST-60L |
|---|---|
| Silnik | |
| Moment trzymający | • 2,4 Nm |
| Bezwładność wału | • 690 gcm2 |
| Długość (L - rysunek poniżej) | • 85 mm |
| Temp. pracy | • 0 do 55°C |
| Sterownik | |
| Algorytm sterowania | • zamknięta pętla sprzężenia zwrotnego (32 bitowy procesor ARM) |
| Napięcie zasilania | • 24VDC +/- 10% |
| Pobór prądu | • maks. 500mA (nie licząc silnika) |
| Temperatura robocza | • 0 do 50°C |
| Prędkość obrotowa | • 0 do 3000 obr/min |
| Rozdzielczość (wybierana mikroprzełącznikiem) | 500, 1000, 1600, 2000, 3200, 3600, 4000, 5000, 6400, 8000, 10000, 20000, 25000, 36000, 40000, 50000 |
| Częstotliwość impulsów sterujących | • maks. 500 kHz (wypełnienie 50%) |
| Funkcje zabezpieczające | • przekroczenie: prądu, prędkości, napięcia, wstecznej siły elektromotorycznej (back EMF), temperatury; • błędy: przeciązenia; podłączenia silnika, podłączenia enkodera; osiągnięcia pozycji zadanej, dynamiczny błąd śledzenia pozycji, pamięci ROM |
| Wskaźnik LED | • zasilanie, rodzaj alarmu, "w pozycji", praca |
| Prąd podczas pracy | • 50% ~ 150% (ustawiany za pomocą oprogramowania narzędziowego |
| Prąd na postoju | • 20% ~ 100% (ustawiany za pomocą oprogramowania narzędziowego |
| Metoda sterowania | • 1-pulsowa / 2-pulsowa |
| Kierunek wirowania | • zgodnie/przeciwnie z ruchem wskazówek zegara |
| Zadawanie prędkości (pozycji) | • częstotliwościowo (impulsowo) |
| Sygnały wejściowe | • impulsy zadające, Aktywacja napędu, Kasowanie alarmu (optoizolowane) |
| Sygnały wyjściowe | • "w pozycji", alarm (optoizolowane) |
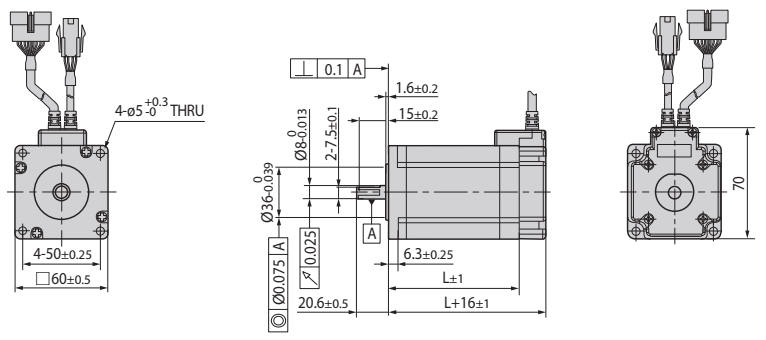
Napęd serwo krokowy S-SERVOII-ST-60L-A - wymiary:
Pytania dotyczące produktów
Znaleźliśmy inne produkty, które mogą Cię zainteresować!
-
 130,13 zł 105,80 zł
130,13 zł 105,80 zł -
 2 540,44 zł 2 065,40 zł
2 540,44 zł 2 065,40 zł -
 Ostatnia cena: 2 540,44 zł 2 065,40 zł
Ostatnia cena: 2 540,44 zł 2 065,40 zł -
 1 884,11 zł 1 531,80 zł
1 884,11 zł 1 531,80 zł -
 73,55 zł 59,80 zł
73,55 zł 59,80 zł -
 152,77 zł 124,20 zł
152,77 zł 124,20 zł -
 Ostatnia cena: 2 443,24 zł 1 986,37 zł
Ostatnia cena: 2 443,24 zł 1 986,37 zł



