





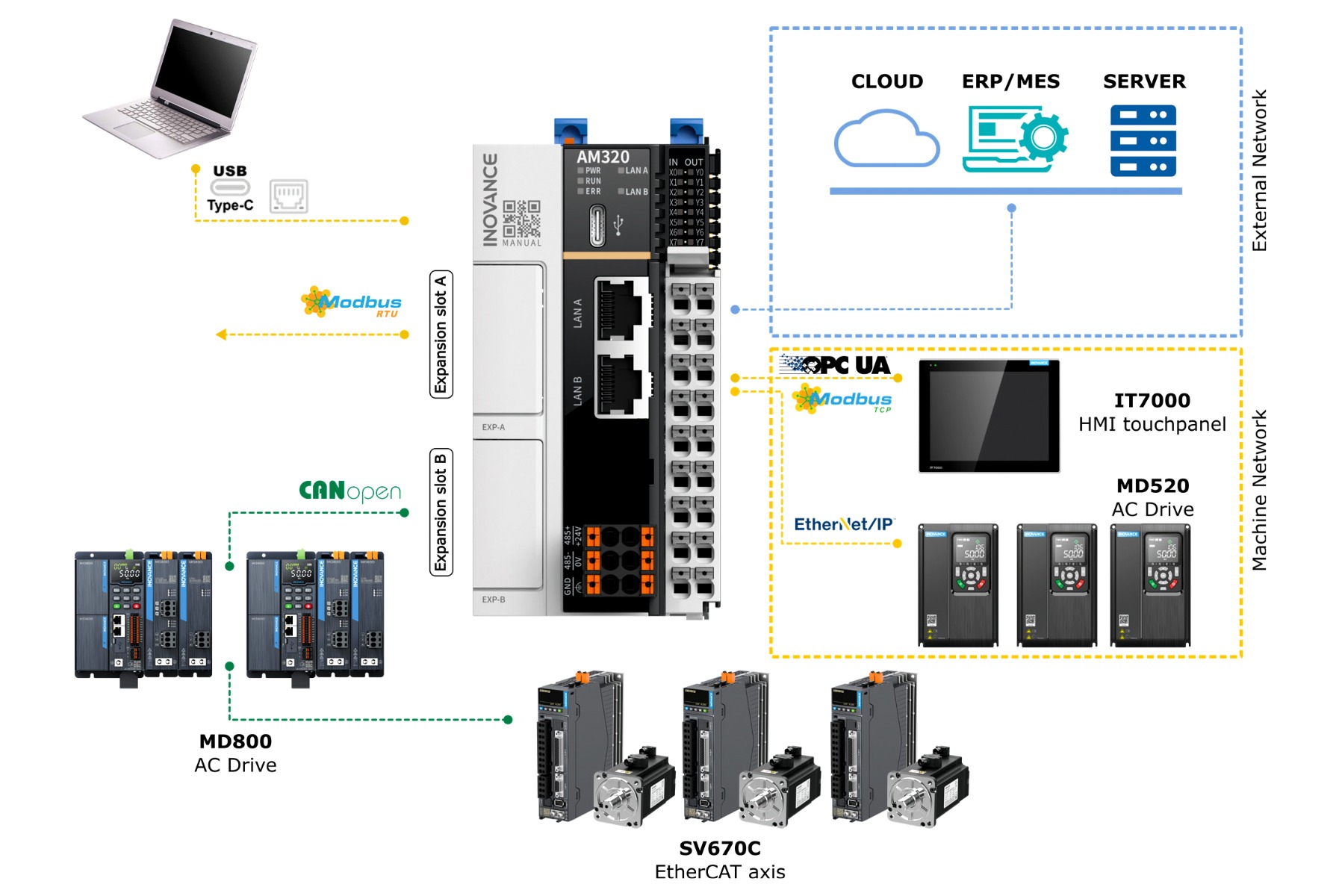
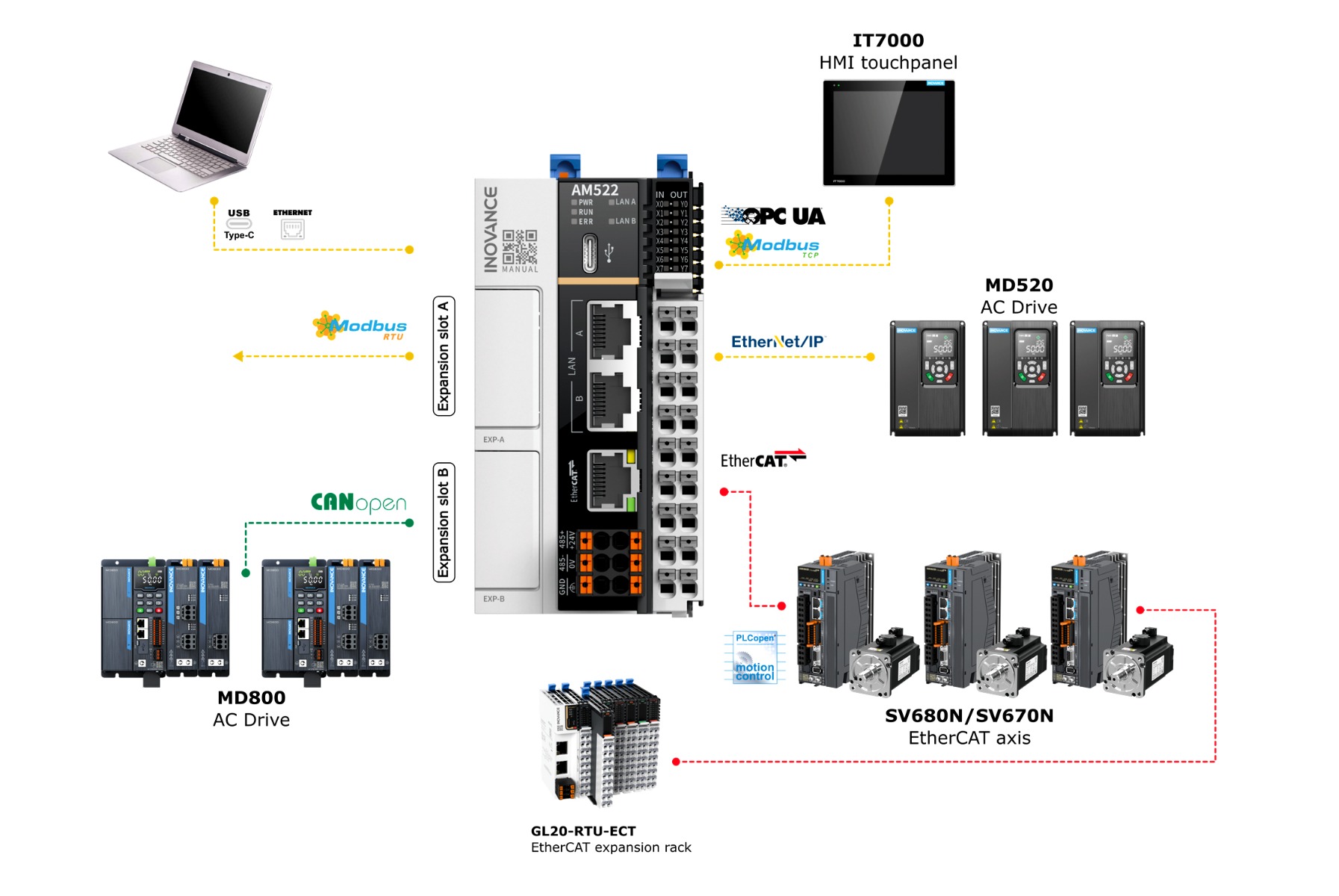



















Dzięki InoProShop programowanie sterowników serii AM300/AM500 staje się intuicyjne i efektywne. Narzędzie bazuje na powszechnie znanym wśród programistów PLC środowisku CODESYS obsługującym standard IEC 61131-3. Dzięki zaawansowanym funkcjom symulacji i debugowania InoProShop wspiera szybkie testowanie i wdrażanie sterowników serii AM producenta automatyki przemysłowej, firmy Inovance. Niniejsza pierwsza część poradnika uczy jak przeprowadzić pełną konfigurację PLC dla pracy w sieci EtherCAT. W kolejnym odcinku pokażemy jak stworzyć pierwszy program PLC i jak go wgrać do pamięci sterownika.
12 listopada 2024
